- розрахунок вегетаційний індекс (NDVI);
- складання ортофотопланів поля з високою точністю;
- захист рослин;
- визначати динаміку зміни в стані посівів;
- інвентаризація сільськогосподарських угідь;
- створення й поновлення карт оброблюваних земель;
- вимір хімічного складу ґрунтів;
- оцінка обсягу і якості проведення польових робіт, контроль їхнього виконання;
- розрахунок обсягу внесених добрив;
- планування посівних робіт;
- оцінка схожості сільськогосподарських рослин;
- оптимізація зрошення й витрат водних ресурсів;
- ведення моніторингу стану посівів;
- прогноз урожайності сільськогосподарських культур;
- контроль якості збору врожаю;
- ведення екологічного моніторингу угідь;
- охорона посівів від пожеж і крадіжок.
- Як дрони допоможуть сільському господарству
- Дрони пропонують включити до програми компенсації вартості сільгосптехніки
- США встановить додаткові мита на імпорт м’яса з ЄС
- НЕ МОДА, А НЕОБХІДНІСТЬ
- Агродронам дозволили літати не вище 120 метрів
Сучасні безпілотні літальні апарати у сільському господарстві
Безпілотні літальні апарати розпочали застосовувати у різних галузях виробництва ще на при кінці минулого століття. Але з удосконаленням електронних, навігаційних систем, джерел енергії безпілотні літальні апарати масово почали застосовуватись останні 10 років. І їх удосконалення все більше прогресує. Обладнані GSP та РТК антенами літальні апарати мають можливість із точністю до 2 см рухатись по заданій траєкторії польоту дотримуючись заданої висоти.
Використання безпілотних літальних апаратів, у останні роки стрімко поширюється майже на всі сфери діяльності. Дрони застосовують повсюдно: від військових операцій, патрулювання кордонів до рятувальних місій та вирішення побутових питань – фото- відеозйомок свят чи доставки товарів.
Одним із найперспективніших напрямків застосування дронів є сільське господарство. За прогнозами Міжнародної асоціації безпілотних систем (AUVSI), БпЛА будуть мати найбільший вплив саме на сільськогосподарську галузь. Прибуток від використання БпЛА в аграрній сфері США спеціалістами оцінюється у 75 мільярдів доларів США до 2025 року за рахунок створення нових робочих місць та оптимізації існуючих процесів.
Що таке Безпілотні літальні апарати? Відповідно до п.23 ч.1 ст.1 Повітряного кодексу, безпілотне повітряне судно (БПС) – повітряне судно, призначене для виконання польоту без пілота на борту, керування польотом якого і контроль за яким здійснюються за допомогою спеціальної станції керування, що розташована поза повітряним судном. Так, що всі безпілотні літальні апарати і є БПС, але у повсякденному використанні вживаються терміни такі, як: безпілотні літальні апарати (БпЛА), мультикоптери (квадрокоптери), дрони.
Безпілотні літальні апарати можна поділити на два типи: літаки та мультикоптери. Літак – це повітряне судно призначене для польотів в атмосфері за допомогою силової установки, що створює тягу, і нерухомого щодо інших частин апарату крила, що створює підйомну силу.
На рисунку 1 зображено безпілотні літальні апарати літакового типу, що використовуються у сільському господарстві.
 |  |
| а) «Торнадо» | б) Дрон DroneUA PD1900 |
Рис. 1 – Безпілотний літальний апарат літакового типу
Перевагою даних літаків є їх швидкість польоту (до 200 км/год), відповідно продуктивність, енергоощадність. За рахунок того, що їх тримання у повітрі відбувається підйомною силою крила час польоту літаків у рази більший порівняно із дронами і становить 2 і більше годин.
Мультикоптер (англ. Multirotor, multicopter) – літальний апарат, побудований за вертолітної схемою, з трьома і більше несучими гвинтами.
Багатогвинтові вертольоти розроблялися ще в перші роки вертольотобудування. Один з перших квадрокоптерів (англ. Quadcopter, чотирьохгвинтовий вертоліт), який реально відірвався від землі і міг триматися в повітрі, був створений Георгієм Ботезату і випробуваний в 1922 році. Недоліком цих апаратів була складна трансмісія, що передавала обертання одного мотора на кілька гвинтів. Винахід рульового гвинта і автомата перекосу поклало край цим спробам. Нові розробки почалися в 1950-і роки, але далі прототипів справа не просунулася.
Нове народження мультикоптери отримали в XXI столітті, вже як безпілотні апарати. Завдяки простоті конструкції, квадрокоптери часто використовуються в аматорському моделюванні. Мультикоптери зручні для недорогий фото і відеозйомки.
Мультикоптери мають 3 або більше гвинтів постійного кроку (автомата перекосу, на відміну від одно- і двогвинтових апаратів, немає). Кожен гвинт приводиться в рух власним двигуном. Половина гвинтів обертається за годинниковою стрілкою, половина - проти, тому рульового гвинта мультикоптерам не потрібен. Маневрують мультикоптери шляхом зміни швидкості обертання гвинтів. наприклад:
прискорити всі гвинти - підйом;
прискорити гвинти з одного боку і уповільнити з іншого - рух в бік;
прискорити гвинти, що обертаються за годинниковою стрілкою, і уповільнити обертаються проти - поворот напроти своєї осі.
Щоб забезпечити стабільний політ, мультикоптер обладнують трьома гіроскопами, що фіксують крен апарату. Як допоміжний інструмент, також використовується акселерометр, дані від якого дозволяють контролеру встановлювати абсолютно горизонтальне положення, і бародатчик, який дозволяє фіксувати апарат на потрібній висоті. Також, застосовують радар для автоматичної посадки і утримання невеликої висоти, а також для обльоту перешкод. І найголовніше – GPS-приймач, що дозволяє записувати маршрут польоту заздалегідь, з комп'ютера, а також, повертати апарат в точку зльоту, в разі втрати керуючого радіосигналу, або знімати параметрів польоту.
Сучасне застосування мультикоптерів дуже різноманітне: від іграшок, доставки товарів, аматорських засобів для фото- та відеозйомки до пасажирських і вантажних транспортних засобів та бойових роботів.
У дронах використовуються колекторні і безколекторні електродвигуни та літій-полімерні акумулятори в якості джерела енергії. Пропелери більшість встановлені безпосередньо на вал двигуна. Це призводить до певних обмежень на їх польотні характеристики. Час польоту мультикоптерів із масою 1–4 кг, становить 10–30 хвилин, а із збільшенням маси дрона їх час польоту ще менший. Корисне навантаження малих і середніх дронів становить від 500 г до 2-3 кг, що дає можливість підняти в повітря відеокамеру, або інше не важке обладнання (наприклад пристрій для розселення трихограми). Одним із елементів вирощення органічної продукції є захист рослин від шкідників із застосуванням біологічних засобів захисту, серед яких є трихограма. Трихограма використовується від ряду шкідників на полях і садах. Так, як норми внесення дуже малі, від 4 до 12 г/га, тому засоби розселення трихограми мають малі габарити, що доцільно їх встановлювати на мультикоптери. Однією із таких розробок є дозувально-висівний пристрій для розселення трихограми розроблений Національним науковим центром «Інститут механізації та електрифікації сільського господарства» (рис. 2). Цей пристрій 2 за допомогою підвісу 3 монтується на квадрокоптер 1.

Рис. 2. – Квадрокоптер DJI Phantom 4 обладнаний дозувально-висівним пристроєм для розселення трихограми
Час польоту дронів вантажопідйомністю до 1 кг становить 20–28 хв, тому місткість бункера для матеріалу в залежності від норми розселення становить не більше ніж 500 мл.
Крім того існують і досить великі моделі мультикоптерів, з кількістю пропелерів близько 6–8 (гекса і октокоптери), здатні підняти в повітря вантаж масою 20–30 кг. Для збільшення вантажопідйомності застосовують співвісне розташування пропелерів, що в разі гексакоптера, дає 12 пропелерів, розташованих попарно на 6 несучих променях. Швидкість польоту мультикоптер може бути від нуля (нерухоме висіння в точці) до 110 км/год. Запасу енергії акумуляторної батареї дозволяє окремим моделям дронів відлітати на відстань до 7-12 км, на практиці ж радіус дії зазвичай обмежена дальністю дії апаратури радіоуправління. Загалом найбільшим обмеженням на дальність польоту дрона є акумуляторна батарея. Заряду однієї батареї квадрокоптера Phantom 4 вистачає на 28 хв. польоту, а такого дрона, як AGRAS T16 із злітною вагою 39,5 кг обладнаного батареєю 17500 мАгод (рис. 3) лише на 10 хв.

Рис. 3. – Мультикоптер AGRAS T16
Ці обмеження призводять до того, що мультикоптери зазвичай використовуються як апарати «ближнього радіусу дії»: для аматорських польотів недалеко від себе, для фото-відеозйомки об’єктів на близькій відстані і так далі. Для порівняння, безпілотні літаки з акумулятором аналогічної ємності можуть відлітати на 10-15 км при висоті польоту 1-2 км.
Розглянувши типи безпілотних літальних апаратів можна зробити висновок, що літаки на багато продуктивніші у порівнянні із мультикоптерами, але у керуванні вони складніші. Для їх запуску у залежності від злітної маси необхідно мати злітну-посадкову смугу. При виконанні таких робіт, як розселення трихограми, обприскування, якість розподілу матеріалу значно вища за рахунок відсутності вертикального повітряного потоку від пропелерів, що значно підвищує ширину захвату.
Використання БпЛА у сільському господарстві можна звести до двох функцій: моніторингу і транспортуванню корисного навантаження.
Під моніторингом розуміють фото-відеозйомка, всі інші операції із подальшою обробкою матеріалу відбувається у конторі на стаціонарних комп’ютерах із спеціалізованим програмним забезпеченням.
Найчастіше для моніторингу сільгоспугідь застосовують дрони, оснащені фотокамерами, які проводять зйомку у видимому діапазоні RGB, або NIR-модифікованими камерами, і RedEdge) і отримувати набір рішень, що дозволяє обробляти будь-які цифрові зображення.
Для покращення роботи дронів використовуються такі програмні продукти, як DroneDeploy, що забезпечує простий автоматизований політ і збір даних, а також дозволяє переглядати і обмінюватися високоякісними інтерактивними картами, ортофотопланами і 3D-моделями.
Програмне забезпечення Pix4D mapper Pro автоматично перетворює знімки, зроблені вручну, за допомогою безпілотника, або на літаку, а також забезпечує високоточні 2D і 3D моделі з географічною прив’язкою з можливістю експорту отриманих результатів.
Також є багато іншого програмного забезпечення для обробки фото-відео файлів. ContextCapture, Photoscan і інші були створені для швидкої побудови тривимірних моделей методом фотограмметрії. Особливо затребувані вони стали з появою доступних БпЛА, а разом з тим і можливістю швидко і дешево проводити зйомку з повітря. Таким чином виділився окремий клас програм автоматизованої фотограмметричної обробки матеріалів аерофотозйомки.
Використання БпЛА із використанням програмного забезпечення допомагає розв’язувати такі завдання:
NDVI являє собою відношення ближньої інфрачервоної області (NIR) мінус видимого червоного відбивної здатності (VIS), поділеного на NIR плюс VIS: NDVI = (NIR-VIS)/(NIR+VIS).
На рисунку 4 зображено відмінності фото у різних діапазонах, порівнюючи звичайне фото поля озимої пшениці та NDVI зображення.
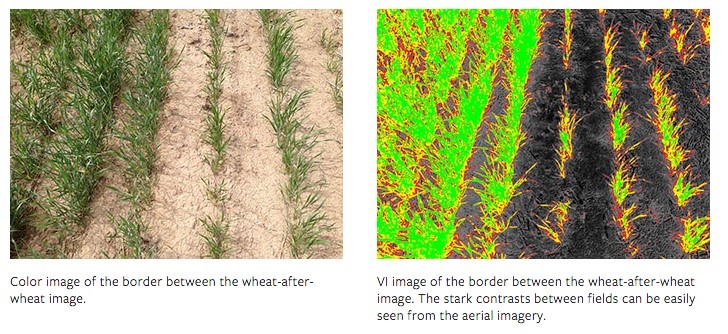
Рис. 4. – VIS та NDVI зображення поля озимої пшениці
Зображення праворуч показує, як NDVI поліпшує роздільну здатність кольорів за якою можна визначити здоров’я рослин. NDVI є найбільш поширеним індексом із визначення вегетаційного розвитку рослин, але є і інші.
На основі побудованих карт NDVI також біохімічного аналізу рослин, попередника у сівозміні формуються карти внесення азотних добрив. Диференційоване внесення добрив дає можливість оптимізувати живлення рослин, заощадити на добривах, і знизити хімічне навантаження на ґрунт. Карти диференційованого внесення азоту можуть застосовуватися як для ручної, так і для автоматичного регулювання доз внесення.
Органічне виробництво вимагає розумного підходу до внесення засобів захисту рослин. Карти внесення гербіцидів формуються на основі інформації про посіви і карти розвитку бур’янів, отриманої за даними дистанційного сканування. Створення карт розвитку бур’янів дозволяє вчасно визначити необхідність використання гербіцидів і оптимально розподілити їх по полю.
При проведенні картографування за один виліт, дрон в середньому покриває площу 40-50 га. При цьому дальність польоту складає 2 км, час польоту складає до 30 хв, робоча висота сягає до 300 м.
Для транспортування корисного навантаження використовують більш потужні дрони із корисним навантаженням, у залежності від поставлених задач, до 50 кг. На даний час такі дрони використовуються для внесення засобів захисту. На існуючі дрони-оприскувачі встановлюють резервуари для робочої рідини об’ємом 10, 20 літрів. Як було зазначено вище, час роботи з таким навантаженням становить 18, 10 хвилин. Найсучасніша модель представлена на ринку України, це гексакоптер AGRAS T16 компанії DJI. Суттєвою відмінністю від попередніх моделей є його модульна конструкція, що спрощує збірку і щоденний догляд за дроном. Захист рівня IP67 забезпечує безпеку головних компонентів літального апарату. Змінні компоненти такі, як акумулятор та резервуар робочої рідини можна замінити за декілька секунд, що підвищує його продуктивність. За рахунок установлених на ньому датчиків дрон у роботі повністю копіює поверхню рослинності (рис. 5).

Рис. 5. – Траєкторія руху гексакоптера AGRAS T16 над оброблюваними насадженнями дерев
AGRAS T16 відрізняється чудовими льотними характеристиками. Місткість бака для робочої рідини становить 16 л. Система розпилення отрутохімікатів оснащена 8-ма форсунками по 2 у парі та 4-ма насосами на кожну пару форсунок окремо. Витрата препарату при обприскуванні становить 4,8 л/хв. Продуктивність дрона при обприскуванні становить 10 га/год. Система розпилення також обладнана електромагнітним витратоміром, який забезпечує більш точну і стабільну обробку ділянки.
За даними представника компанії DJI при висоті польоту над горизонтом рослин робоча ширина становить 6,5 м. Із рисунка 6 а) видно, що розподіл робочої рідини відбувається за рахунок вихрових потоків створених несучими гвинтами мультикоптера.
 |  |
| а) | б) |
Рис. 5. – Робота AGRAS T16 при обробці посівів зернових
Але з рисунка 6 б) видно, як робоча рідина практично без перекриття опускається до низу, що піддає сумніву рівномірності розподілу рідини. Тому необхідно ретельно досліджувати процес захисту рослин від шкідників.
За даними інтернет джерел, вартість обробки гектара посівів із допомогою дрона-оприскувача коливається у межах 3,5 доларів, що на відміну з причіпними обприскувачами вартуватиме 8-10 доларів за гектар.
При визначенні на полі проблемних ділянок – підвищена кількість бур’янів, пошкодження шкідниками, які визначаються за допомогою відеокамери з фіксацією координат і потім обробляються.
Також при обробці посівів наземними обприскувачами на один гектар витрачається 300-400 літрів рідини для покриття листків рослин засобом захисту з використанням прилипачів. При цьому до 40% рідини скотиться на ґрунт. Завдяки застосуванню на дронах спеціальних форсунок, які розташовані під лопатями двигунів та технології ультрамалообємного обприскування (коли крапля подрібнюється до розміру 50-100 мікрометрів), досягається зменшення витрати робочої рідини до п’яти літрів на гектар – тобто у 60-80 разів. Це суттєва – до 30-40% – економія діючої речовини.
Для біологічного захисту рослин від шкідників із використанням ентомофага трихограма на дронах монтують пристрої для розселення трихограми. Так, як дози внесення не великі в межах 1–8 гр/га пристрої виготовлені із легких матеріалів і мають малу масу і з матеріалом становить до 500 гр. такі пристрої можна монтувати на легкі дрони такі, як Phantom (рис. 2). Національним науковим центром «Інститут механізації та електрифікації сільського господарства» розроблено пристрій для розселення трихограми для квадрокоптера Phantom 4. Цей пристрій повністю виготовлений із пластику і має малу масу (120 гр.). За рахунок гравітаційного дозування біоматеріал не пошкоджується. Конструкція дозувально-висівного пристрою дає можливість рівномірно розподілити матеріал із робочою шириною захвату 6 метрів, що відповідає вимогам. Висота польоту при розселенні трихограми повинна бути не менше ніж 5 м., а продуктивність апарата становить до 10 га/год.
Не залежно від типу БпЛА, що використовується, процес збору інформації складається з декількох етапів, а саме:
Планування рейсу.

Рис. 6. – Побудова траєкторії польоту БпЛА.
За допомогою програмного забезпечення на карті Google Earth будується траєкторія польоту БпЛА (Рис. 6). Також є програми, наприклад DroneDeploy, у якій потрібно тільки обвести контури поля і лінії польоту будуть побудовані автоматично. Після чого траєкторія польоту завантажуєте у дрон і він готовий до польоту.
Політ та відеозйомка місцевості
Завантажевши план польоту БпЛА готовий до роботи. Відправивши дрон в політ обладнання автоматично буде проводити моніторинг за допомогою установленій на борту камери. Якщо ви не використовуєте повністю інтегрований пакет, то одна людина повинна буде приймати знімки вручну в той час як GPS автопілот або інший пілот керують літак.
Побудова зображень
Найбільш складною частиною моніторингу є побудова карт. За час роботи дрона він отримує масив зображень високої якості. Всі ці зображень необхідно обєднати, і перетворюються в ортофотоплан 2D-зображення, обробляються і аналізуються, щоб отримати корисну інформацію.
Аналіз отриманих результатів
Після обробки даних можна проаналізувати стан посівів (рис. 7).
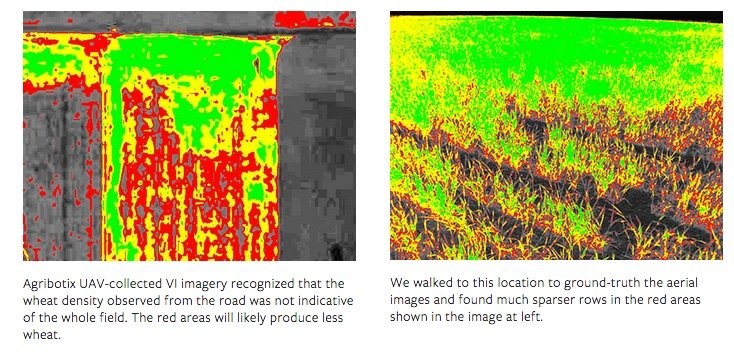
Рис. 6. – Побудова траєкторії польоту БпЛА.
Переваги і недоліки
БпЛА здатні збирати інформацію про стан полів, достатню для точного застосування засобів захисту. Це дає можливість заощадити на використанні хімії, а також зберігає навколишнє середовище. Дрони дозволяють створити картографію з точними координатами всіх об’єктів, що дозволить в подальшому вести візуальний аналіз об’єктів з точністю до кількох сантиметрів. Можна буде нанести векторні шари: поля, об’єкти інфраструктури, дороги, що дозволяє розраховувати точні площі, відстані, потреби в ресурсах і т.п. Зручно визначати об’єктивну площа ріллі, сіножатей, пасовищ, якості сівби, недосіву і пересіву. Аерофотозйомка з БпЛА більш деталізована, ніж космічний знімок. Забезпечується істотна економія витрат на дослідження і виграш у часі по-порівнянні з усіма іншими їх видами: наземним обстеженням; супутниковими фотографіями, використанням пілотованої авіації.
Важливо підібрати БпЛА скориставшись консультацією фахівців, щоб не купити, наприклад, дорогий дрон з великою дальністю польоту (в кілька годин), якщо вам потрібно аерозйомка полів площею в межах 20 тис. га, з чим впораються і моделі БпЛА зі значно нижчою ціною. Приблизна формула для вибору безпілотника така: середня швидкість БпЛА час польоту = дальність польоту. Ця величина повинна бути трохи більше довжини полів господарства по максимальному лінійному виміру. Звичайно, якщо стоїть завдання не тільки аерозйомки, то вибір може бути іншим.
Схожі новини


Фотозвіти
")
")







Новини техніки
-
Гидравлические насосы-дозаторы: что важно знать перед выбором
Насос с дозатором – гидравлический узел, который функционирует вместе с насосом НШ и гидроцилиндром. Прямое его
Докладніше







")




